

ine 5341
Visualização Realística em 3D, zBuffering e Raytracing
 2.1.
O
que é Raytracing ?
2.1.
O
que é Raytracing ?
2.2.
Exemplos
de Raytracing
2.3.
Buffer
de Profundidade - z-Buffering
2.4.
Conversão
de Varredura (Scan Conversion)
2.5.
Modelando
a Iluminação de um Objeto
2.6.
Principais
Raytracers
2.7.
Tutorial
de Raytracing usando POV-Ray
2.8.
O Método da Radiosidade: Modelando Radiância e
Interação Luminosa entre Objetos
2.9.
Material
Fotográfico para o Trabalho de Modelagem em POV-Ray
Este material se baseia em parte nas On-Line Computer Graphics Notes, Computer Graphics Group, Computer Sciences Department, University of California, Davis, originalmente escritas por Ken Joy.
Uma operação fundamental extensivamente utilizada para visualização em CG é o proceso de conversão por varredura ou rasterização (scan conversion ou rasterization). Dado um polígono em espaço de imagem (de mundo), este processo determina os pixels que interceptam este polígono.
A Conversão por Varredura é um procedimento que é largamente utilizado em Computação Gráfica. É um procedimento bastante simples, organizado em torno de um paradigma de rastreamento de bordas, que pode ser implementado através de um algoritmo que utiliza a simples adição de incrementos sobre valores-base previamente calculados. Este método é utilizado em algoritmos de superfícies visíveis (visible-surface algorithms), técnicas de sombreamento incremental (incremental-shading techniques), algoritmos de preenchimento de polígonos, algoritmos de aceleração de raytracing e outras tarefas similares.
Um dos usos primários do método é a determinação de valores de profundidade z para os polígonos na cena, o que nos permite reter somente polígonos visíveis para renderização ao final de nossos cálculos, através da utilização posterior de um algoritmo de Buffer de Profundidade sobre os dados de coordenada z obtidos. Podemos, no entanto, também utilizar quantidades relacionadas a grandezas como cor, textura e outros parâmetros nos nossos nodos de pontos terminais e incrementar esses fatores também, incluindo esses valores no algoritmo de forma similar ao que será feito com a cálculo da coodenada z.
Este capítulo é organizado nas seguintes seções:
1. Conversão por Varredura de Trapézios em Espaço de Dispositivo
2. Realizando a Varredura
3. Inicializando o Rastreador de Bordas
4. Atualizando o Rastreador de Bordas para Linhas de Varredura Subseqüentes
5. A Estrutura de Dados de Pontos Finais
6. Identificando os Pixels Interceptados a cada Linha de Rastreamento
7. Incrementando o valor de Z para Pixels Consecutivos
8. Estabelecendo um Valor de Profundidade para Cada Pixel
9. Toques para Quem quer ir mais Fundo
Conversão por Varredura de Trapézios em Espaço de Dispositivo
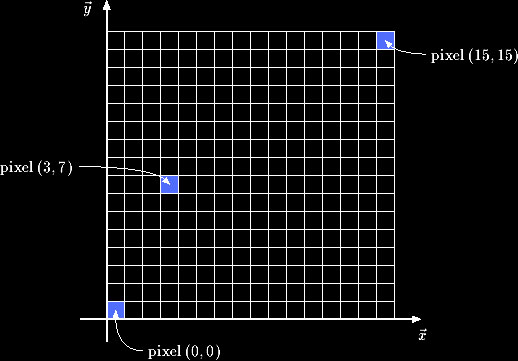
A conversão de varredura é o processo de se encontrar os pixels de tela que interceptam um polígono. Para realizar isto, normalmente criamos uma cópia dos dados do espaço de imagem (coordenadas do mundo) escalonada para corresponder aproximadamente à resolução da nossa viewport. Este espaço, comumente chamado de espaço de dispositivo, é parametrizado de tal forma que o canto inferior esquerdo está em (0,0), de forma que todos os pixels podem ser indexados por inteiros.
Para a conversão por varredura de um polígono neste espaço, nós vamos dividir o polígono em uma série de trapézios, como mostrado na figura abaixo, e então converter por varredura cada um destes trapézios. Cada trapézio será gerado de forma que que as boirdas superior e inferior do trapézio sejam paralelas às linhas de varredura, possuindo y constante nesta região. Também levamos em conta trapézios degenerados sob a forma de triângulos, que possuem o topo ou a base com comprimento zero. Na figura abaixo, os trapézios superior e inferior do desenho são de fato triângulos.
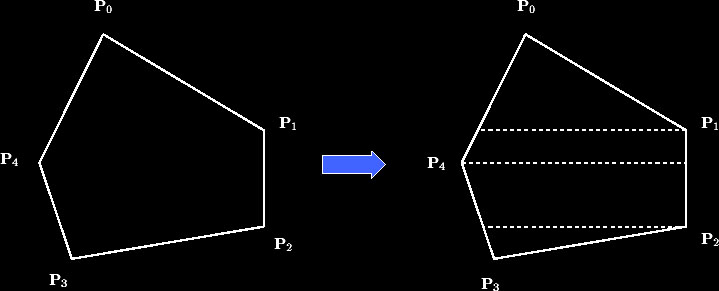
A união de todos os pixels que interceptam o conjunto de trapézios será o conjunto de pixels que intercepta o polígono.
Realizando a Varredura
A idéia aqui é simples. Vamos criar um rastreador de bordas que segue os pontos finais das linhas formadas pela intersecção de cada linha de varredura com o trapézio.
Inicializando o Rastreador de Bordas
Suponha que seja dada uma borda definida pelos pontos P1 = (x1, y1, z1 ) e P2 = (x2, y2, z2 ), definida em espaço de dispositivo. Se definirmos Dx = x2 - x1, eDy = y2 - y1, então a figura abaixo mostra como calcular o ponto inicial (somente os valores de x e y são mostrados por questão de simplicidade).
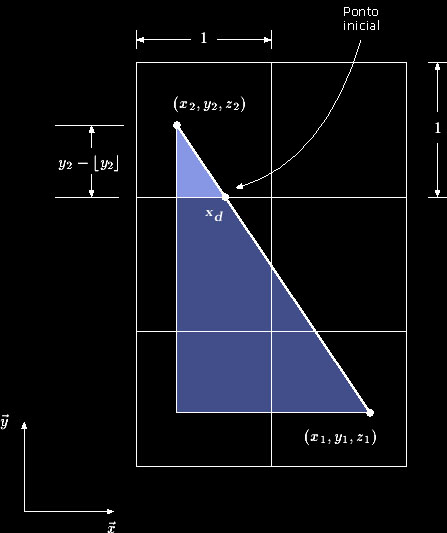
Podemos ver que o ponto inicial é dado por:
onde ![]() é o valor discretizado de y2,
na posição da linha de varredura-base mais próxima
abaixo de y2,
ou seja, valor inteiro da linha de pixels onde o valor y2
cairá dentro. Para calcular xd,
observamos que há dois triângulos similares na
ilustração
e que podemos escrever:
é o valor discretizado de y2,
na posição da linha de varredura-base mais próxima
abaixo de y2,
ou seja, valor inteiro da linha de pixels onde o valor y2
cairá dentro. Para calcular xd,
observamos que há dois triângulos similares na
ilustração
e que podemos escrever:



Atualizando o Rastreador de Bordas para Linhas de Varredura Subseqüentes
Suponha que seja dada uma borda definida por dois pontos P1 = (x1, y1, z1 ) e P2 = (x2, y2, z2 ), definidos em espaço de dispositivo. Se definirmos Dx = x2 - x1, Dy= y2 - y1, e Dz = z2 - z1,então a figura abaixo mostra como atualizar o rastreador de bordas. Por razões de simplicidade omitimos a coordenada z.
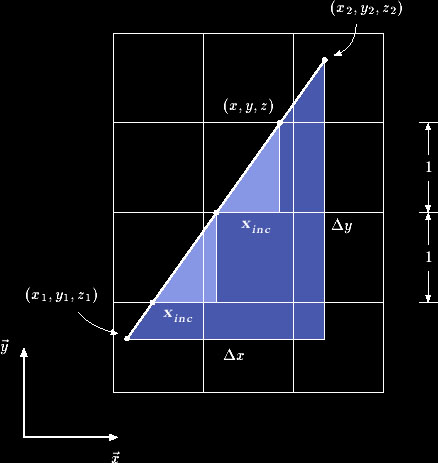
Aqui novamente temos triângulos similares e pode-se facilmente ver que para mover o rastreador de uma linha de varredura para a outra somente necessitamos de atualizar seu ponto final:
(x, y, z)


A Estrutura de Dados de Pontos Finais
A forma mais simples de se implementar um rastreados de bordas de trapézios é criar-se uma estrutura de dados simples que contenha tanto a informação (x, y, z) dos pontos finais como dos incrementos que são necessários para ir do ponto final de uma linha de varredura à outra. Um nodo desta estrutura contém pelo menos a seguinte informação:
![\begin{singlespace}\small\begin{center}\begin{tabular}{ \vert c \vert }\hline......\ [-.5em]$y_{min}$\ \\ [.5em]\hline\end{tabular}\end{center}\end{singlespace}](varre1.jpg)
onde(x,y,z)
é o ponto final, xinc
é o incremento adicionado à coordenada x
para
ir de uma linha de varredura à outra, zinc
é o incremento adicionado à coordenada z
para ir de uma linha de varredura à outra e ymin
é o limite inferior do trapézio que indica ao algoritmo
quando
parar de rastrear.
Identificando os Pixels Interceptados a cada Linha de Rastreamento
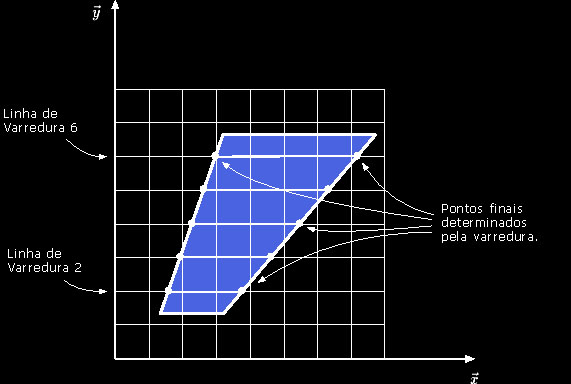
Para encontrar os pixels que interceptam um trapézio, criamos dois rastreadores de bordas e percorremos o trapézio no sentido y, linha de varredura por linha de varredura. Isto nos permite determinar, para cada linha de varredura, quais são os pontos finais de um segmento de reta que forma a intersecção da linha de varredura com as bordas laterais do trapézio.
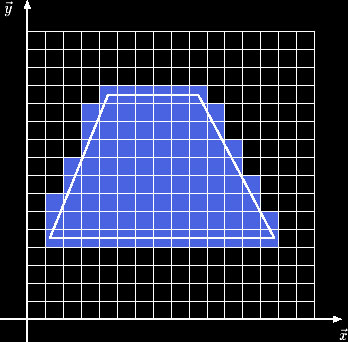
Para encontrar quais são so pixels que interceptam o trapézio em uma determinada linha de varredura, nós precisamos apenas determinar as coordenadas do canto esquerdo inferior de cada pixel. Se os pontos finais( xesq, y , zesq) e ( xdir, y , zdir) calculados na linha de varredura em y, então os pixels que interceptam o trapézio são indexados por:
 |

Incrementando o valor de Z para Pixels Consecutivos
Estabelecer um incremento para o valor de z à medida que avançamos de uma linha de varredura para outra é bastante simples. A mesma coisa vale quando nos movemos de um pixel a outro, embora os dois incrementos sejam diferentes. Ambos os incrementos podem ser calculados diretamente a partir do vetor normal do trapézio, se assumirmos que o trapézio seja planar, como se assume para todo polígono que é tratado com as regras da geometria plana.
Oberve aqui, que o único polígono que tem necessariamente que ser planar é um triângulo, onde os seus três vértices por definição descrevem um plano. Polígonos com numero de vértices maior do que 3 não precisam necessariamente possuir todos os seus vértices contidos em um único plano. Um polígono não planar é possível de ser definido, mas ele não serve para este algoritmo e deve ser sempre obrigatoriamente dividido em subpolígonos planares, normalmente triângulos. Esta divisão sempre é possível e este teste é implementado em alguuns lugares como parte do sistema. Browsers de VRML, por exemplo, sempre realizam o teste de planaridade com algum polígono dado como superfície fechada e dividem-no em triângulos caso não seja planar, antes de renderizá-lo.Para vermos como isto funciona, seja
Se
fizermos ![]() = < xn, yn, zn
>, poderemos
calcular o
produto escalar como
= < xn, yn, zn
>, poderemos
calcular o
produto escalar como
 |
equação que pode ser resolvida para dar
que é o incremento horizontal de z pixel a pixel. Observe que este não é o memso que o incremento vertical de z.
Estabelecendo um Valor de Profundidade para Cada Pixel
Já que um pixel é identificado por usa coordenada de espaço de dispositivo no canto inferior esquerdo do pixel, é útil para nossos algoritmos de renderização serem capazes de atribuir um valor z para um trapézio neste ponto. Nós já demonstramos como calcular os valores de z nos pontos finais. Nós somente necessitamos modificar este valor de forma que seja apropriado para a coorenada do valor inferior esquerdo de um pixel. Portanto, dado um ponto extremo (x, y, z), considere a figura abaixo:
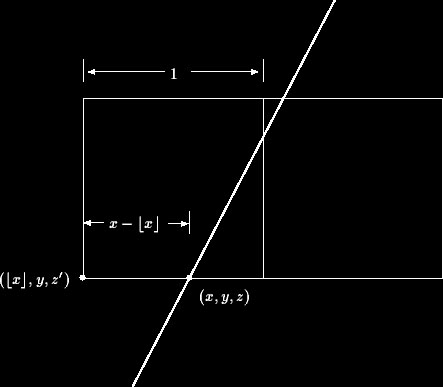
Olhando a figura, podemos ver que deveríamos subtrair de z uma porção do incremento horizontal de zque corresponde à distância de x do lado esquerdo do pixel. Podemos expressar isto da seguinte forma:
![]()
Usando os cálculos acima, podemos utilizar a estrutura de dados de pontos finais para organizar mecanismos de rastreamento de bordas. Esta informação, uma vez que os trapézios serão sempre planos, pode então ser utilizada de forma linear para atribuir um valor de z local para todos os pixels, mesmo internos, do trapézio.
Toques para Quem quer ir mais Fundo
A abordagem que nós demos ao tema neste capítulo é extremamente superficial e simples. O objetivo deste capítulo é que você entenda os princípios gerais do processo e saiba o que um Raytracer ou OpenGL faz. Se você implementar o método como está descrito aqui, ele vai funcionar, mas os seus resultados práticos não vão se comparar a implementações avançadas, como as encontradas em Raytracers como POV-Ray ou RADIANCE. Se você deseja aprofundar o assunto de conversão por varredura, sugerimos o site a UC Davis. Este site é, na Internet, de longe, a melhor fonte de informação séria e confiável. Vá para a página das On-Line Computer Graphics Notes, mantidas por professores e estudants do Computer Graphics Group, Computer Science Department, na UC Davis.

