Universidade Federal
de Santa Catarina - UFSC ![]()
Curso de Pós Graduaçăo em Cięncias da Computaçăo - CPGCC
Disciplina: Visăo Computacional
ALGORITMOS PARA DETECÇĂO DE BORDAS
Mestranda: Daniela Marta Seara
Florianópolis, dezembro de 1998.
4. OPERADORES PARA DETECÇÃO DE BORDAS
5. ALGORITMOS DE DETCÇÃO DE BORDAS
6. LINKS RELACIONADOS COM VISÃO COMPUTACIONAL
A visăo computacional envolve a identificaçăo e classificaçăo de objetos em uma imagem, desta forma a detecção de bordas é uma ferramenta essencial no processo de análise de imagens. Este trabalho tem como objetivo dar uma breve introdução sobre os conceitos que envolvem o processo de detecção de bordas. A importância de tal processo é devido ao fato de que ao se detectar uma borda podemos localizar todos os objetos de uma imagem definindo desta forma, propriedades como área, perímetro e forma.
![]()
O primeiro passo na análise de imagens é a separaçăo ou a segmentaçăo dos objetos dentro da imagem. Algoritmos de segmentaçăo permitem achar diferenças entre dois ou mais objetos. A segmentaçăo é baseada em dois conceitos: similaridade e descontinuidade.
Na segmentaçăo procura-se distinguir as partículas umas das outras e do fundo. Esta distinçăo permitirá ao programa interpretar pixels contíguos e agrupá-los em regiőes. Năo existe um modelo formal para a segmentaçăo, o processo é essencialmente empírico e deverá se ajustar a diferentes tipos de imagem. Esta etapa é a mais difícil do processo e também a mais delicada porque todas as medidas serăo realizadas sobre as regiőes identificadas nesta etapa. A segmentaçăo é tăo complexa porque tenta traduzir para o computador um processo cognitivo extremamente sofisticado realizado através da visăo humana.
A descontinuidade em uma imagem pode ser:
a) Detecção de pontos: é a mais simples técnica de detecçăo. Um ponto terá uma mudança drástica do valor de cinza em relaçăo aos seus vizinhos.
b) Detecção de linhas: é o processo mais complicado, pois é necessário achar os pixels que săo semelhantes e testá-los para verificar se săo parte de uma linha comum.
c) Detecção de bordas: é uma das técnicas básicas utilizadas pela visăo humana no reconhecimento de objetos. É o processo de localizaçăo e realce dos pixels de borda, aumentado o contraste entre a borda e o fundo. Este processo verifica a variaçăo dos valores de luminosidade de uma imagem. Como foi abordado anteriormente, neste trabalho daremos ênfase apenas para os algoritmos de segmentação para detecção de bordas.
![]()
É o contorno entre um objeto e o fundo indicando o limite entre objetos sobrepostos Um CONTORNO é uma linha fechada formada pelas bordas de um objeto. Mas como conceituamos e detectamos uma borda computacionalmente?
Variaçőes de intensidade complexas que ocorrem em uma regiăo săo geralmente chamadas de textura. Bordas săo definidas como picos da magnitude do gradiente, ou seja, săo variaçőes abruptas que ocorrem ao longo de curvas baseadas nos valores do gradiente da imagem. As bordas săo regiőes da imagem onde ocorre uma mudança de intensidade em um certo intervalo do espaço, em uma certa direçăo. Isto corresponde a regiőes de alta derivada espacial, que contém alta frequęncia espacial.
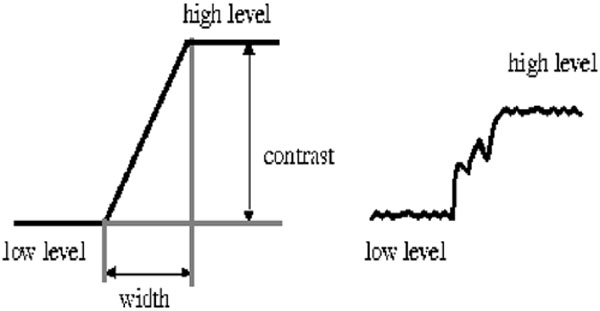
Figura 3.1: Gráfico da intensidade de uma imagem.
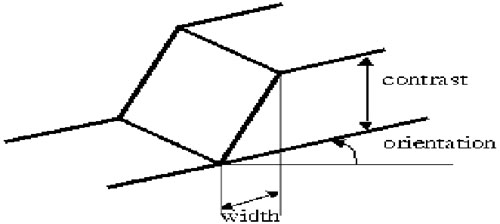
Figura 3.2: Gráfico da intensidade representando uma borda bidimensional.
A aquisiçăo da imagem está sujeita a algum tipo de ruído, a situaçăo ideal (sem ruído), na prática năo existe. Ruídos năo podem ser previstos pois săo de natureza randômica e năo podem nem mesmo ser medidos precisamente. Porém, algumas vezes ele pode ser caracterizado pelo efeito na imagem, e é geralmente expresso como uma distribuiçăo de probabilidade com uma média específica e um desvio padrăo. Existem dois tipos de ruídos específicos:
![]()
4. Operadores para detecçăo de bordas - Operadores de derivadas
Desde que uma borda é definida por uma mudança no nível de cinza, quando ocorre uma denscontinuidade na intensidade, ou quando o grandiente da imagem tem uma variaçăo abrupta, um operador que é sensível a estas mudanças operará como um detector de bordas.
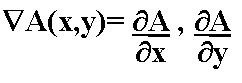
Um operador de derivada faz exatamente esta funçăo. Uma interpretaçăo de uma derivada seria a taxa de mudança de uma funçăo, e a taxa de mudança dos níveis de cinza em uma imagem é maior perto das bordas e menor em áreas constantes. Se pegarmos os valores da intensidade da imagem e acharmos os pontos onde a derivada é um ponto de máximo, nós teremos marcado suas bordas. Dado que as imagens săo em duas dimensőes, é importante considerar mudanças nos níveis de cinza em muitas direçőes. Por esta razăo, derivadas parciais das imagens săo usadas, com as respectivas direçőes X e Y. Uma estimativa da direçăo atual da borda pode ser obtida usando as derivadas x e y como os componentes da direçăo ao longo dos eixos, e computar o vetor soma. O operador envolvido é o gradiente, e se a imagem é vista como uma funçăo de duas variáveis A(x,y) entăo o gradiente é definido como:
4.1 Mácaras dos Algoritmos de Segmentaçăo
A maioria dos algoritmos de segmentaçăo utilizam uma máscara sobre os pixels da imagem para detecçăo de uma descontinuidade. Cada pixel e seus pixels vizinhos tem um valor do nível de cinza multiplicados por uma constante. A soma destes valores representa a máscara de resposta daquele ponto.
Exemplo de uma máscara de resposta
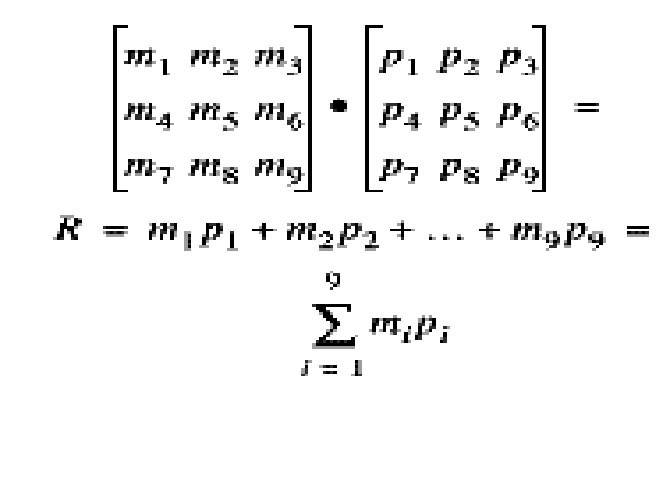
Onde:
mi: é valor para um pixel
pi: é o valor do nível de cinza para um pixe
R: é a máscara de resposta para o pixel central (p5).
Ampliando esta máscara atravessando a imagem linha por linha, um novo vetor é criado. É o mesmo que a imagem original mais contém os valores da máscara de resposta ao invés do valor do pixel. Estes valores da máscara de resposta podem entăo ser comparados com o valor mínimo de threshold para determinar quais pixels săo mais prováveis de ser parte de uma borda. Este threshold pode ser ajustado para variar seletivamente de acordo com os pixels de borda, permitindo um usuário conduzir o algoritmo para um melhor desempenho para uma imagem específica.
Considerando o exemplo da máscara de entrada anterior e supondo um valor de threshold 20. A matriz 3x3 representa uma parte de uma determinada imagem, desde que os valores de saída que cancelem o valor central, năo ultrapassem o valor de threshold, o que significa que a imagem năo apresenta descontinuidade.
EXEMPLO1:
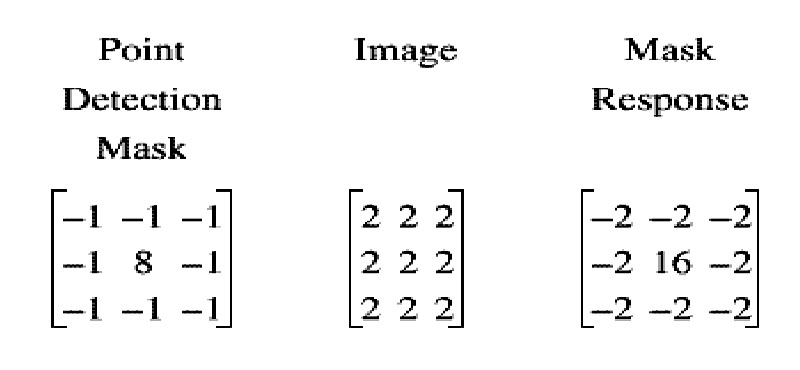
Analisando a máscara de resposta para o conjunto contínuo de pixels dados no exemplo acima, percebemos que neste caso o valor central da máscara é 16, e a soma de todos os pixels subtraída do valor central fornece zero como resposta. Como zero é um valor menor do que o threshold (20), o pixel central na imagem não é um ponto de descontinuidade.
EXEMPLO2:
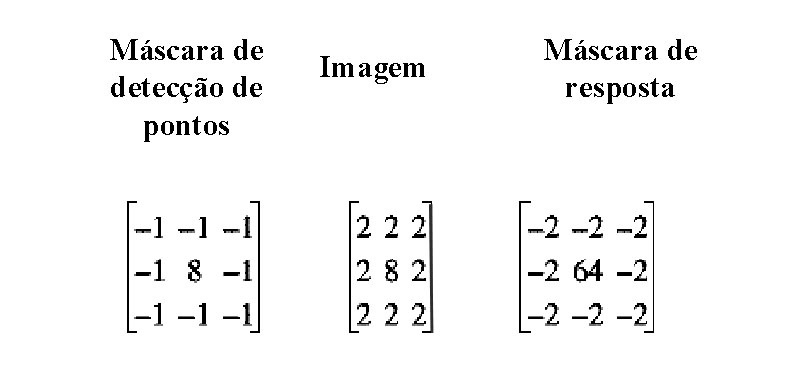
Neste caso o valor central da máscara é 64, a soma de todos os pixels subtraída do valor central fornece um valor de 48 que é maior do 20 (threshold), o pixel central na imagem é um ponto de descontinuidade, portanto seria um pixel de borda.
![]()
5. ALGORTMOS DE DETECÇÃO DE BORDAS
Os algoritmos para detecção de bordas que serão estudados no presente trabalho são:
É o mais antigo e simples algoritmos de detecçăo de bordas. Utiliza uma matriz 2x2 para encontrar as mudanças nas direçőes x e y.
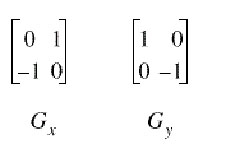
Figura 5.1.1: Máscara de Roberts.
Para determinar onde o pixel avaliado é ou năo um pixel de borda, o gradiente é calculado da seguinte forma:
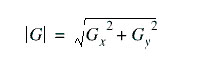
Figura 5.1.2: Fórmula para cálculo do gradiente
Se a magnitude calculada é maior do que o menor valor de entrada (definido de acordo com a natureza e qualidade da imagem que esta sendo processada), o pixel é considerado ser parte de um borda. A direçăo do gradiente da borda, perpendicular a direçăo da borda, é encontrada com a seguinte fórmula:
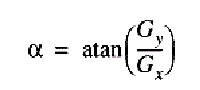
Figura 5.1.3: Fórmula para cálculo da magnitude
O pequeno tamanho da máscara para o operador de Roberts torna o mesmo fácil de se implementar e rápido para calcular a máscara de resposta. As respostas săo muito sensíveis ao ruído na imagem.
Utiliza duas máscaras para encontrar os gradientes vertical e horizontal das bordas.
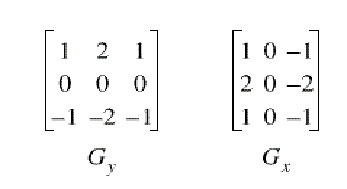
Figura 5.2.1: Máscaras de Sobel.
Considerações sobre o operador de Sobel
É similar em operaçăo ao de Sobel, porém usa um conjunto de oito máscaras, onde quatro delas săo as seguintes:
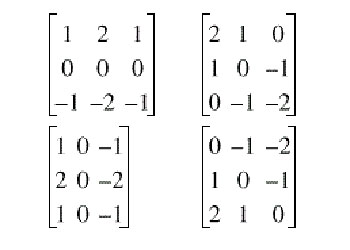
Figura 5.3.1: Máscaras de Robinson
As outras quatro săo simplesmente negaçőes destas quatro.A magnitude do gradiente é o valor máximo obtido ao aplicar todas as oito máscaras ao pixel vizinho, e o ângulo do gradiente pode ser aproximado como o ângulo na linha de zeros na máscara dando a resposta máxima. Este algoritmo aumenta a precisăo de |G|, mas requer mais computaçăo do que Roberts e Sobel, devido ao tamanho das máscaras.
5.4 Detector de bordas de Canny
Definiu um conjunto de metas que um detector de bordas deveria Ter săo eles:
O detector de bordas de Canny é um filtro de convoluçăo f que uniformizaria o ruído e localizaria as bordas. O problema é identificar um filtro que otimize os tręs critérios do detector de bordas. Se considerarmos uma borda de uma dimensăo variando no contraste e entăo convolucionando a borda com a funçăo de uniformizaçăo de Gauss, o resultado será uma variaçăo contínua do valor inicial ao final, com uma inclinaçăo máxima no ponto onde existe um "degrau". Se esta continuidade é diferenciada em relaçăo a x, esta inclinaçăo máxima será o máximo da nova funçăo em relaçăo a original. .
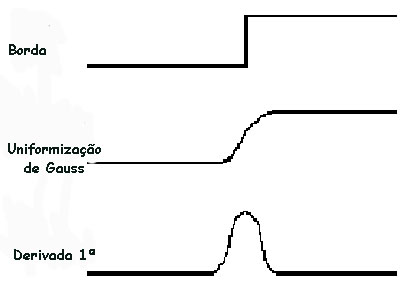
Figura 5.4.1: Detcção de bordas por Canny
Os máximos da convoluçăo da máscara e da imagem indicarăo bordas na imagem. Este processo pode ser realizado através do uso de uma funçăo de Gauss de 2-Dimensőes na direçăo de x e y. Os valores das máscaras de Gauss dependem da escolha do sigma na equaçăo:
Figura 5.4.2: Função de Gauss
A aproximaçăo do filtro de Canny para detecçăo de bordas é G'. Convolucionando a imagem com G' obtemos uma imagem I que mostrará as bordas, mesmo na presença de ruído. A convoluçăo é relativamente simples de ser implementada, mas é cara computacionalmente, especialmente se for em 2-dimensőes. Entretanto,uma convoluçăo de Gauss de 2-dimensőes pode ser separada em duas convoluçőes de Gauss de 1-dimensăo.
A intensidade computacional do detector de bordas de Canny é relativamente alta, e os resultados săo geralmente pós-processados para maior clareza. Entretanto, o algoritmo é mais eficiente no processamento de imagens com ruídos ou com bordas difusas.
Algoritmo de Canny
Um máximo da derivada primeira ocorrerá a cada zero crossing da derivada Segunda. Para localizar bordas horizontais e verticais procuramos a derivada Segunda nas direçőes de x e y. Isto é Laplacian de I:
Laplacian é linear e simétrico rotacionalmente. Podemos procuar pelos zeros crossings da imagem primeiro uniformizando com uma máscara de Gauss e entăo calculando a derivada Segunda. Isto define o operador de Marr-Hildreth.
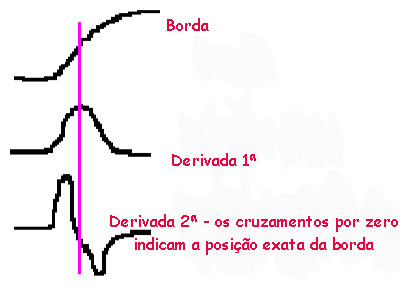
Figura 5.5.1: Zero Crossing
O operador de Marr-Hildreth tornou-se largamente utilizado devido:
Considerações sobre os operadores de derivadas de segunda ordem
Método de Marr-Hildreth
![]()