Visão Computacional
1998
Esqueletonização e Reconhecimento de
Formas
Autor : Luiz Henrique Brillinger
Curso
Introdução ao Tratamento de Imagens e à
Visão Computacional
Luiz Henrique Brillinger
12-Esqueletonização
14-Reconhecimento
de Formas
12-Esqueletonização
Introdução
-
-
O que é esqueletonização ?
-
Pode ser compreendido como a forma de representar imagens através
da extração de suas características pelo processo de
afinamento, resultando os pixels essenciais para composição
de segmentos lineares com comprimento, tamanho e direção.
-
-
Não é aplicavel à todos os objetos.
-
O objetivo dos passos subsequentes muitas vezes indicam a técnica
a ser usada.
Transformação do eixo médio
-
-
Blum (1967)
-
Trata todos pixels da borda como fonte de uma onda, que excita seus vizinhos
com intervalo de tempo proporcional a distância.
-
Quando duas ondas se encontram anula-se produzindo o eixo médio ou
o esqueleto.
-
Para usar este conceito em uma imagem calcula-se a distância de cada
pixel até o pixel de borda mais próximo.
-
Pode ser usado a distância Euclidiana, 4-distância ou
8-distância.
-
Calcule a distância Laplaciana.
-
Os pontos que possuem maior valor pertencem ao esqueleto.
Métodos Morfológicos Iterativos
-
-
São baseados na retirada repetitiva de pixels em volta do objeto.
-
Um conjunto de regras define quais pixels podem ser removidos.
-
Normalmente um esquema de templates é usado para aplicar as regras.
-
O processo para quando após duas passadas consecutivas não
há retirada de pixel.
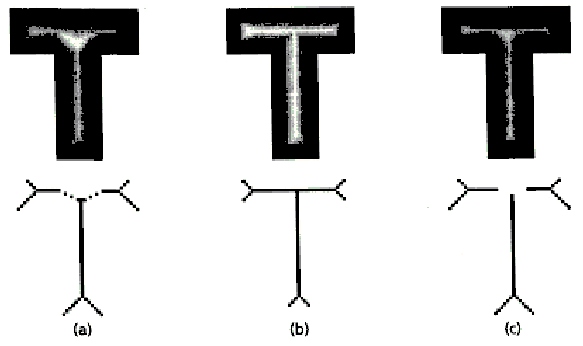
Stentiford - 1983
-
-
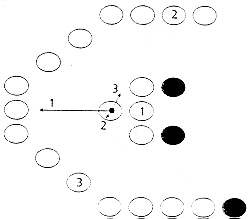
Usa 4 templates 3x3
-
Quando a template "bate" com a imagem o pixel do meio é removido
(conectividade
¹ 1).
-
Cada template possui uma ordem de procura:
-
-
M1 -
esquerdaé direita, de
cimaé baixo.
M2 -
cimaé baixo, da
esquerdaé direita.
M3 -
direitaé esquerda, de
baixoé cima.
M4 -
cimaé baixo, da
direitaé esquerda
-
-
a: remove pixels do topo
-
b: remove pixels da esquerda
-
c: remove pixels de baixo
-
d: remove pixels da direita
-
-
Problemas com algoritmos de erosão:
-
-
-
-
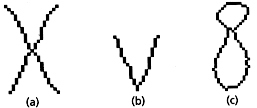
a-Rebaixo (Necking) interseção de retas
b- Cauda (tail) ângulo agudo entre retas
c- Espúrio (spurious, line fuzzy) sujeiras conectadas
-
-
Steinford sugere preprocessar para minimizar estes problemas.
-
-
Aplicar procedimento chamado "acute angle emphasis" para problemas de necking.
-
-Passar a primeira template de cada tipo se foi removido pixel anteriormente.
-
-
Resultado do pre-processamento mais o
afinamento.
-
O método é inconstante e não resolve problemas com
caracteres largos.
-
O preprocessamento não casa com todas as situações de
problemas.
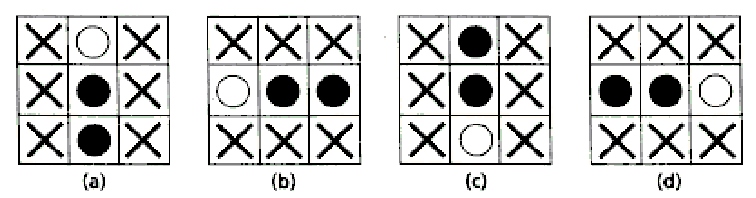
Zhang - 1984
-
-
Mais rápido e simples de ser implementado que o anterior (paralelo).
-
O método é dividido em 2 subiterações :
-
-
Primeira:
-
1 - Se a conectividade for 1.
-
2 - Se tem pelo menos 2 vizinhos pretos e não mais que 6.
-
3 - Se pelo menos um deles for branco (i,j+1), (i-1,j) e (i,j-1)
-
4 - Se pelo menos um deles for branco (i-1,j), (i+1,j) e (i,j-1)
-
Marque os pixels e remova no final desta subiteração.
-
-
Segunda:
-
repita os passos 1 e 2 anterior
-
3 - Se pelo menos um deles for branco (i-1,j), (i,j+1) e (i+1,j)
-
4 - Se pelo menos um deles for branco (i,j+1), (i+1,j) e (i,j-1)
-
Marque os pixels e remova no final desta subiteração
-
-
O T ficou perfeito e o problema de cauda sumiu.
-
Apresenta problema de rebaixo e espúrio.
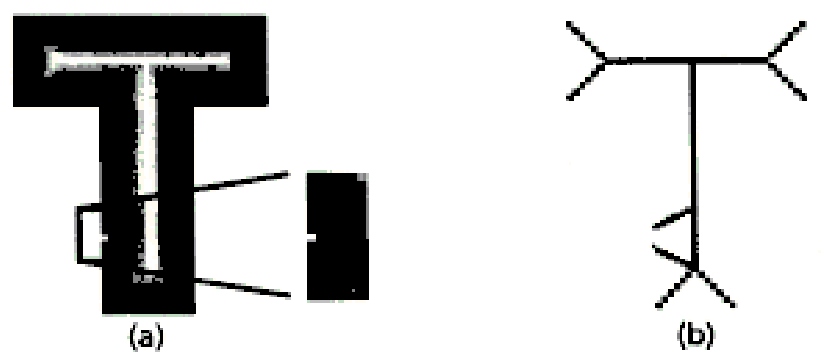
Uso do Contorno de Objeto
-
-
Consiste em selecionar o pixel do meio entre cada borda (Baruch 1988).
-
O método usa uma janela retangular que cobre o objeto a ser
esqueletonizado.
-
O pixel esqueletal esta no centro da janela.
-
A próxima janela é posicionada em função do pixel
esqueletal atual.
-
-
Procedimento:
-
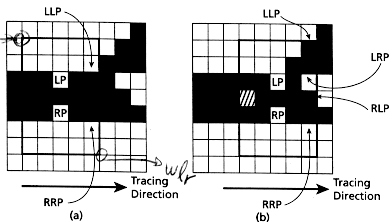
Escolher um ponto a esquerda (LP) e um a direita (RP) na borda do objeto
e construir uma janela com distância fixa a partir de LP e RP.
-
O pixel entre LP e RP é esqueletal.
-
Localizar LLP e RRP na borda da janela na direção do esqueleto.
-
Deslocar a janela para o novo ponto (LP=LLP e RP=RRP).
-
Quando um pixel de fundo é encontrado dentro da janela existe uma
ramificação.
-
Selecionar, na borda da janela o pixel anterior entre LLP e RRP como LRP
e o pixel posterior ao pixel de fundo como RLP.
-
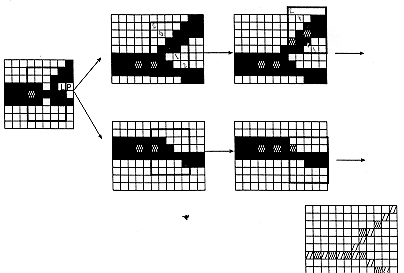
Recursivamente faça LP=LLP e RP=LRP...
-
Quando voltar faça LP=RLP e RP=RRP (do ponto ramificado).
-
-
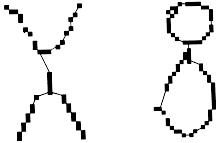
Os pixels esqueletais são conetados com linhas finas para facilitar
a visualização.
Objeto como Polígono
-
-
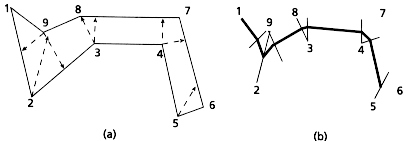
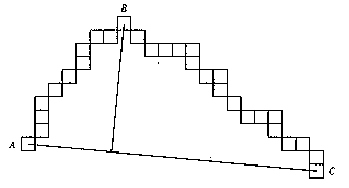
Martinez-Perez (1987) usa as propriedades geométricas de um
polígono, que representa a borda de um objeto, para localizar o esqueleto.
-
Criar vetores entre cada pixel e armazena-los no sentido horário.
-
-
Procedimento:
-
Se o ângulo entre dois vetores for menor que 180°, uma bissetriz
e construída até o lado oposto do polígono.
-
Senão uma linha normal é construída no final e no
início dos vetores até o lado oposto do polígono.
-
O esqueleto inicia no vértice 1 e passa através dos pontos
médios das linhas construídas.
-
-
OBS: indicado para objetos finos como caracteres, gráficos, mapas...
-
-
Os vértices 2 e 5 formam ângulo < 180 graus
-
Nos outros vértices são traçadas linhas normais
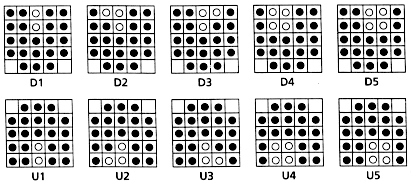
Afinamento baseado na força
-
-
Banda Digital é um conjunto de pixels conectados com as propriedades:
-
Todos os pixels estão dentro de uma distância d e uma
curva discreta C. A distância mínima entre C e
qualquer pixel de borda é d/2.
-
O valor de d é muito menor que o comprimento de C.
-
A direção associada com cada pixel de borda é
aproximadamente a mesma daquele próximo a
C.
-
-
Esta definição vale para a maioria das linhas grossas ou finas.
-
Segmento digital é um subconjunto da banda extraídos com corte
perpendicular a C.
-
Um Fragmento é um segmento digital onde há uma brusca mudança
na direção em C.
-
O fragmento pode ser linear, côncavo ou convexo.
-
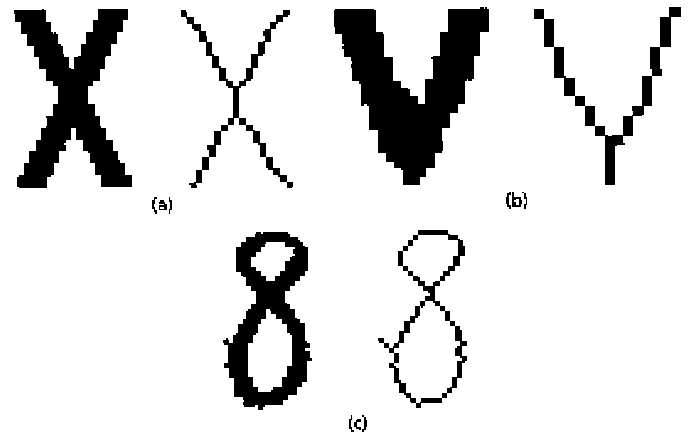
Cada fragmento possui seu esqueleto, que é localizado através
do calculo da força, que os pixels de fundo adjacentes a borda, exercem
sobre os pixels do objeto.
-
-
Quanto mais perto o pixel objeto do pixel de fundo maior a força exercida
sobre ele.
-
O fragmento é mapeado em quadrados e é determinado a
ação da força em seus vértices.
-
O esqueleto cai dentro dos quadrados onde a ação da força
age em direções opostas.
-
Estas áreas são subdivididas para o refinamento do esqueleto.
-
-
A força no pixel é a soma de todas as forças de todos
os pixels visíveis.
-
-
Todos os pontos do fragmento corrente são considerados esqueletos
até encontrar outro esqueleto ou uma borda.
-
Verificar quais pontos podem fazem parte da construção do
esqueleto.
-
Verificar a potencialidade dos pixels do esqueleto serem tbém pixels
de início.
-
O processo se repete até que não haja mais mudanças
ou a força igual a zero.
-
-
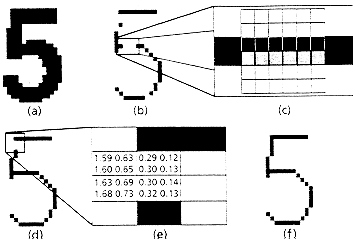
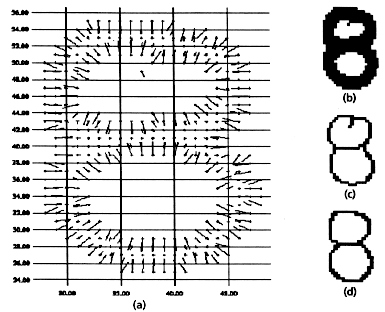
a- força aplicada sobre cada pixel
-
b- figura original.
-
c- afinamento de Zhang-uen.
-
d- esqueleto baseado na força.
14-Reconhecimento de formas
-
-
Após identificar borda ou segmentar imagem, os pixels podem ser agrupados
por operações de grupo.
-
Ao pixel de borda é importante adicionar propriedades como
direção da borda, gradiente, contraste de borda etc.
-
A seguir são realizadas as operações de grupamento com
aqueles de propriedade similar
-
É adicionado aos pixels o grupo a que ele pertence.
-
Estes grupos são segmentados em simples partes para que uma
operação analítica possa ser encaixada.
-
Ledley (1964) foi um dois pioneiros a usar esta técnica.
Conectando linhas e bordas
-
-
Conectando linhas e bordas usando informações direcionais,
é o processo pelo qual os pixels tem direções
suficientemente similares podendo formar seqüências conectadas,
de forma a ser identificada como um segmento de arco.
-
O processo de procura para identificação dos rótulos
é de cima-baixo, esquerda-direita
-
-
Se o rótulo do pixel não foi previamente encontrado em seus
vizinhos, então um novo grupo é criado com a direção
da borda ou linha.
-
Cada grupo é inicalizado com
N0s 0
-
s 0
- variância.
-
N0 - é
o peso da variância.
-
Se houve dois ou mais rótulos vizinhos encontrados, após o
pixel ser agrupado, é feito um teste para determinar se os dois grupos
mais próximos a este podem ser unidos.
Segmentação de arcos
-
-
Segmentação de arcos em um simples segmento, é um processo
que particiona a seqüência do arco digital, extraído
anteriormente, em subseqüências de arco tendo a propriedade que
cada arco tem uma seqüência máxima que pode ajustar uma
reta, ou uma curva de determinado tipo.
-
A base do processo de particionamento é a identificação
dos locais que:
-
A) Tem curvatura suficientemente alta
-
B) É contido por seqüências que podem ajustar uma linha
reta ou curvas de um determinado tipo.
-
Subseqüências que podem ajustar uma reta apresentam uniformidade
de curvatura baixa.
-
Subseqüências que podem ajustar uma curva apresentam uniformidade
de curvatura alta.
-
-
Exemplo de métodos para segmentação:
-
- Ajuste e Corte Iterativo de ponto final.
-
-
-Detecção do Ângulo
Tangente
-
-
\

Transformação de Hough
-
-
É um método para detectar linhas e curvas em imagens com
níveis de cinza.
-
A técnica de Hough (1962) procura por objetos na imagem através
de fórmulas que os descrevem.
-
É um método que pode localizar objetos que não estejam
completamente definidos.
-
Criar uma vetor somatório A com dimensões igual ao número
de parâmetros desconhecidos da equação que está
sendo procurada.
-
Para a equação y=mx + b cria-se a matriz com dimensão
A[m,b].
-
A matriz A deve suportar todos os valores possíveis para m e b.
-
-
Examinando cada pixel e sua vizinhança na imagem, determina se há
evidencia de borda naquele pixel, então calcula-se os parâmetros
da curva específica que passa naquele pixel.
-
A[m,b] é incrementado. Alguns esquemas somam 1 outros a intensidade
do gradiente naquele pixel, ou...
-
Após todos pixels processados, os maiores valores indicam a linha
na imagem.
-
Como o vetor A não diz onde começa e termina a linha, uma estrutura
PTLIST[m,b] guarda o endereço dos pixels que formaram A[m,b]
-
Para localizar o centro do raio de um círculo procede-se de forma
semelhante procurando no vetor A o maior pico.
Exemplo de aplicação Hough
-
-
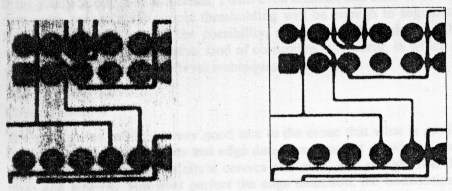
Inspeção de placas de circuito impresso ( Hara et al, 1983
).
-
-
Tamanho da figura é aproximadamente 1,5 cm².
-
Precisão da perfuradora é de 0,025mm.
-
Normalmente um sistema CAD controla a perfuração da placa.
-
Aqui como exemplo é coletado a imagem da placa com uma câmara.
-
Se um quadro fosse captado a 1024 pixel, tería mais que 0,01mm e não
teria precisão 0.025mm
-
Variações nos padrões na aquisição da
imagem.
-
A imagem é fotografada em cima de um filme glossy transparente que
pode causar reflexos, ruídos.
-
Furos com diâmetros diferentes.
-
O histrograma bimodal é representado pela figura a direita.
-
Considerando a aquisição da imagem limpa facilita a
segmentação por limiariadade.