
ine 5341Programa
Visualização Realística em 3D, z-Buffering e Raytracing
z-Buffer:
O Algoritmo de Superfícies Visíveis baseado em Buffer de
Profundidade
Este material se baseia em parte nas On-Line Computer Graphics Notes, Computer Graphics Group, Computer Sciences Department, University of California, Davis, originalmente escritas por Ken Joy.
De todos os algoritmos para determinação de superfície visível, o buffer de profundidade ou zBuffer é talvez o método mais simples e com certeza o mais amplamente utilizado. Em função disso, vamos nos limitar a descrever este método neste texto.
O princípio de funcionamento do algoritmo é muito simples: Para todo pixel na Viewport nós mantemos um registro da profundidade (em termos de coordenada z) do objeto na cena que estiver mais próximo, além de um registro da intensidade, cor, etc, que deveria ser utilizada ao se mostrar este ponto em particular na tela do computador. Toda vez que um novo polígono é processado, um valor de z e de intensidade são calculados para cada pixel que estiver dentro dos limites do polígono. Se o valor de coordenada z obtido para oaquele polígono for inferior ao valor de z armazenado para aquele pixel no buffer, então este objeto está mais próximo do que algum objeto anteriormente renderizado naquela posição e vai ocultar aquele objeto. Neste caso, substituímos o valor armazenado naquela posição do buffer por este novo valor.
Se
não for realizado nenhum cálculo de radiosidade ou outra
técnica de raytracing mais avançada, após o processamento
de todos os polígonos da cena, o buffer de intensidade/cor resultante
representará exatamento os valores dos pixels da Viewport e pode
ser visualizado sem mais nenhuma transformação.
O Método z-Buffer
O algoritmo z-Buffer trabalha em Coordenadas de Vídeo ou Viewport (espaço de dispositivo) e pode ser implementado facilmente como uma extensão/modificação de um algoritmo de conversão por varredura. Uma versão simples de um algoritmo deste tipo vimos no capítulo anterior. O z-Buffer ou Buffer de Profundidade, estrutura de dados da qual o método tira seu nome, é uma matriz n x n na qual o elemento (i,j) corresponde ao pixel (i,j). Esta matriz contém o valor de z em Coordenadas do Mundo (espaço de imagem) do objeto correntemente visível naquele pixel. Além disso, existe outra matriz n x n cujos elementos correspondem à cor ou intensidade luminosa que é para ser atribuída àquele pixel.
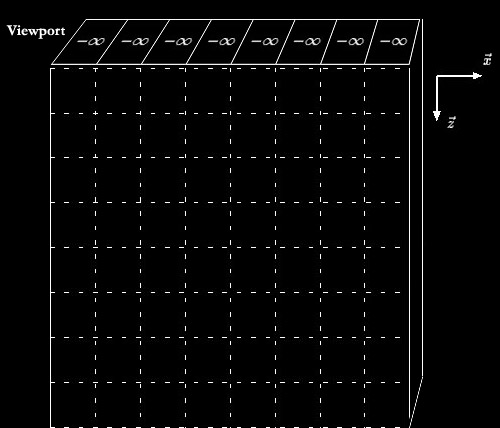
Vamos mostrar a operação do z-Buffer considerando um exemplo bidimensional com uma viewport-linha unidimensional com resolução de 8x1 pixels e com polígonos representados como segmentos de retas, tal qual sugere [Joy93]. É um exemplo extremamente simplista, pois elimina o significado do eixo y, mas os passos a serem executados são praticamente idênticos à execução do algoritmo para três dimensões e dessa forma ficará mais fácil para o leitor compreender.
O buffer
de profundidade é inicializado atribuindo-se a todos os seus elementos
o valor ![]() ,
que pode ser representado por algum valor negativo extremamente alto, já
que não renderizamos polígono algum até este momento.
A matriz de cores ou intensidades luminosas (para renderizações
em preto e branco) é inicializada atribuindo-se a todos os seus
pixels a cor preta. Imagine o z-Buffer como representando o volume
de espaço "atrás" do buffer, na direção z,
tal qual está desenhado na figura abaixo.
,
que pode ser representado por algum valor negativo extremamente alto, já
que não renderizamos polígono algum até este momento.
A matriz de cores ou intensidades luminosas (para renderizações
em preto e branco) é inicializada atribuindo-se a todos os seus
pixels a cor preta. Imagine o z-Buffer como representando o volume
de espaço "atrás" do buffer, na direção z,
tal qual está desenhado na figura abaixo.
O próximo passo é mapear, pixel a pixel, a profundidade de cada objeto da cena que se encontra atrás daquele pixel. Tome cada um dos polígonos, execute a conversão por varredura e, durante esta conversão, execute os passos seguintes:
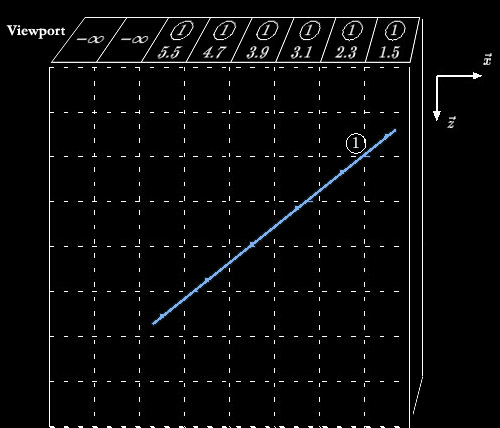
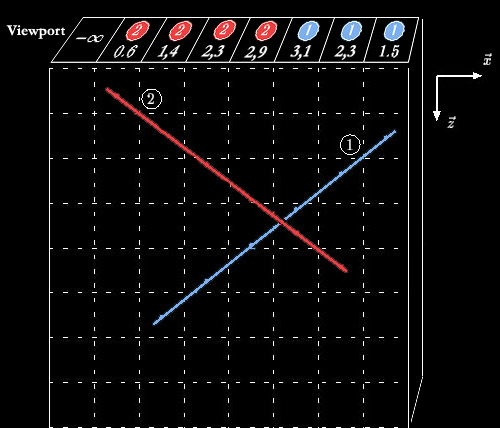
Passo 1 - Verificação de intersecção. Para cada pixel, determine os polígonos da cena cuja conversão de varredura resultou em um elemento com as coordenadas x,y deste pixel.Exemplo: Se inserirmos uma linha, como mostrado abaixo, nós registramos valor de profundidade de cada pixel e obtemos as valores mostrados na figura:Passo 2 - Determinação da ordem de ocultação. Para todos os polígonos da cena, determine para cada pixel (i,j) que intercepta o polígono, se o valor z em Coordenadas do Mundo (eixo z do desenho acima) deste polígono na posição do pixel é maior do que o valor z armazenado no z-Buffer. Se for maior, calcule a cor e outros valores associados a este pixel e os insira na entrada (i,j) da matriz de cor e insira o valor z do polígono naquele ponto na posição (i,j) do z-Buffer. Senão, não faça nada.
Se inserimos uma segunda linha e aplicamos o algoritmo acima novamente, vemos que o z-Buffer foi atualizado e mostra o índice da linha "da frente", visível, naquele pixel e o valor de profundidade da linha naquele ponto.
Podemos descrever na forma de um pseudocódigo bastante simples o que descrevemos acima.
Algoritmo Z-Buffer
Dados:
Lista of polígonos {P1,
P2, ..., Pn}
Matriz z-buffer[x,y] inicializado
com![]()
Matriz Intensidade[x,y]
início
para
cada polígono P
na lista de polígonos
faça {
para cada pixel (x,y) que intercepta P faça {
calcule profundidade-z de P na posição (x,y)
se prof-z < z-buffer[x,y] então {
Intensidade[x,y] = intensidade de P em (x,y)
z-buffer[x,y] = prof-z
}
}
}
Desenhe
Intensidade
fim
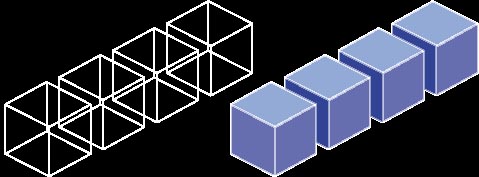
Uma
vez que todo polígono pode ser dividido em um conjunto de trapézios
(se aceitarmos o triângulo como um trapézio degenerado de
topo zero) , basta-nos considerar o algoritmo do zBuffer sobre trapézios.
Para tanto podemos diretamente modificar o algoritmo de renderização
descrito no capítulo sobre Conversão
por Varredura deste texto ou então um dos algoritmos de rasterização
mais avançados encontrados nas rasterization
notes da UC Davis para criar na íntegra o algoritmo de
zBuffer descrito acima. Pode-se utilizar diretamente os procedimentos de
rasterização e de atualização de vídeo
implementados pelo algoritmo de conversão que for ser utilizado.
Toques para Quem quer ir mais Fundo
Um bom livro para você ler e aprofundar este assunto é a segunda edição do Interactive Computer Graphics de Foley, van Damm e outros. Veja a seção de bibliografia deste texto para a referência detalhada. Não perca tempo procurando a primeira edição deste livro, que este assunto não é abordado nela.
Na Internet, de longe, a melhor fonte de informação séria e confiável neste assunto são as On-Line Computer Graphics Notes, mantidas por professores e estudantes do Computer Graphics Group, Computer Science Department, na UC Davis.

